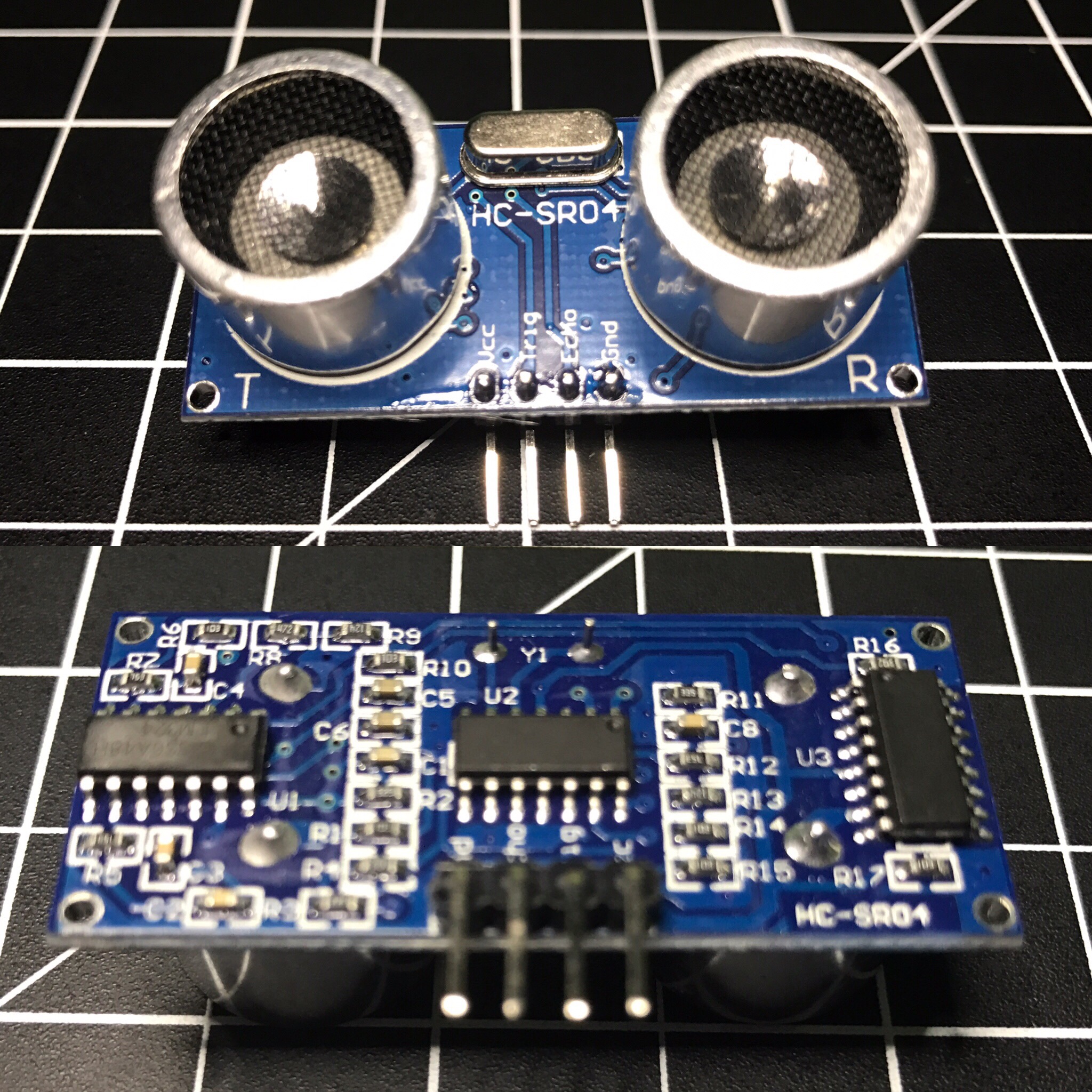
The HC-SR04 ultrasonic sensor uses sonar to determine distance to an object like bats do. It offers excellent non-contact range detection with high accuracy and stable readings in an easy-to-use package. From 2cm to 400 cm or 1” to 13 feet. Its operation is not affected by sunlight or black material like Sharp rangefinders are (although acoustically soft materials like cloth can be difficult to detect). It comes complete with ultrasonic transmitter and receiver module.
Complete Guide for Ultrasonic Sensor HC-SR04
You can get the HC-SR04 from Amazon or various electronics shops for $3-5 or even under $2 if you buy packs of them. I got 2 of them in a parts kit I bought on Amazon and used one for Blog in a Box Paparazzi.
I was using the sensor to sort of detect motion, or more specifically when someone walked into a room. My prototype was set on a desk at about chest height about 1-2 feet after the doorway. While working on the project I ran into several challenges:
- Accuracy of readings.
- Other activity on the Raspberry Pi.
- Sampling over multiple readings.
- Rogue readings vs actual motion.
- Timing between readings.
- Bailing if an echo takes too long.
I wrote my code in Python and heavily based it on ModMyPi’s blog post HC-SR04 Ultrasonic Range Sensor on the Raspberry Pi. Here are the important pieces…
def read_ultrasonic() :
# Make sure the trigger pin is clean
GPIO.output( ULTRASONIC_TRIG_PIN, GPIO.LOW )
# Recommended resample time is 50ms
time.sleep( 0.05 )
# The trigger pin needs to be HIGH for at least 10ms
GPIO.output( ULTRASONIC_TRIG_PIN, GPIO.HIGH )
time.sleep( 0.02 )
GPIO.output( ULTRASONIC_TRIG_PIN, GPIO.LOW )
# Read the sensor
while ( True ) :
start = time.clock()
if ( GPIO.input( ULTRASONIC_ECHO_PIN ) == GPIO.HIGH ) :
break
while ( True ) :
diff = time.clock() - start
if ( GPIO.input( ULTRASONIC_ECHO_PIN ) == GPIO.LOW ) :
break
if ( diff > 0.02 ) :
return -1
return int( round( diff * 17150 ) )
def is_ultrasonic_triggered() :
global prev_ultrasonic
# Take 6 readings
for i in range( 6 ):
ultrasonic = read_ultrasonic()
#Shift readings
prev_ultrasonic = ( prev_ultrasonic[1], prev_ultrasonic[2], prev_ultrasonic[3], prev_ultrasonic[4], prev_ultrasonic[5], ultrasonic )
if ( is_light_enough()
and prev_ultrasonic[0] != -1
and prev_ultrasonic[3] < ULTRASONIC_DIST and prev_ultrasonic[4] < ULTRASONIC_DIST and prev_ultrasonic[5] ULTRASONIC_DIST and prev_ultrasonic[1] > ULTRASONIC_DIST and prev_ultrasonic[2] > ULTRASONIC_DIST ) :
#print 'Ultrasonic: {0}'.format( prev_ultrasonic )
return True
return False
while ( True ) :
if ( is_ultrasonic_triggered() ) :
take_picture()
It worked alright, but triggered a little too often. About a week later I came across the Python package gpiozero, which makes it easy to work with a bunch of common Raspberry Pi GPIO components. I wrote an alternate version of BIAB Paparazzi using this package, which worked a bit better. It was so much simpler with gpiozero because it has built-in support for the HC-SR04. All I had to do was initialize the sensor and tell it what code to run when something in range was detected.
ultrasonic = DistanceSensor( echo = ULTRASONIC_ECHO_PIN, trigger = ULTRASONIC_TRIG_PIN, max_distance = ULTRASONIC_MAX, threshold_distance = ULTRASONIC_DIST ) ultrasonic.when_in_range = take_picture
The neat thing about the gpiozero package is when you initialize a sensor it automatically starts taking readings, keeps the values in a queue, and does comparisons against an average. My code attempted to do something along those lines, but was much more rudimentary. As nice as this version sounds, it still triggered too often. You can find the complete code for both versions in the BIAB Paparazzi repo on GitHub.
I think I was pushing the limits of what the HC-SR04 is meant for. Most of the examples I’ve seen are people using these to detect approaching walls on a robot. The biggest issue I ran into was the inaccurate readings. For example I’d be getting readings of about 160cm and then out of nowhere it would return a distance of 80-90 cm, even several in a row at times.
At the end of the day there are reasons it’s such a cheap sensor. 😉 For a couple of dollars, what do you expect? I’m curious to try my code on a more powerful Raspberry Pi 3 and see if it works any better. Was the less powerful Pi Zero causing problems?
