
Working from excellent information in a Home Assistant forum thread, I put together an ESPHome device to read information from and send commands to our AlorAir Sentinel HD55S Dehumidifier.

The dehumidifier has an RJ45 port on the front, which can be used to communicate over the CAN bus protocol.
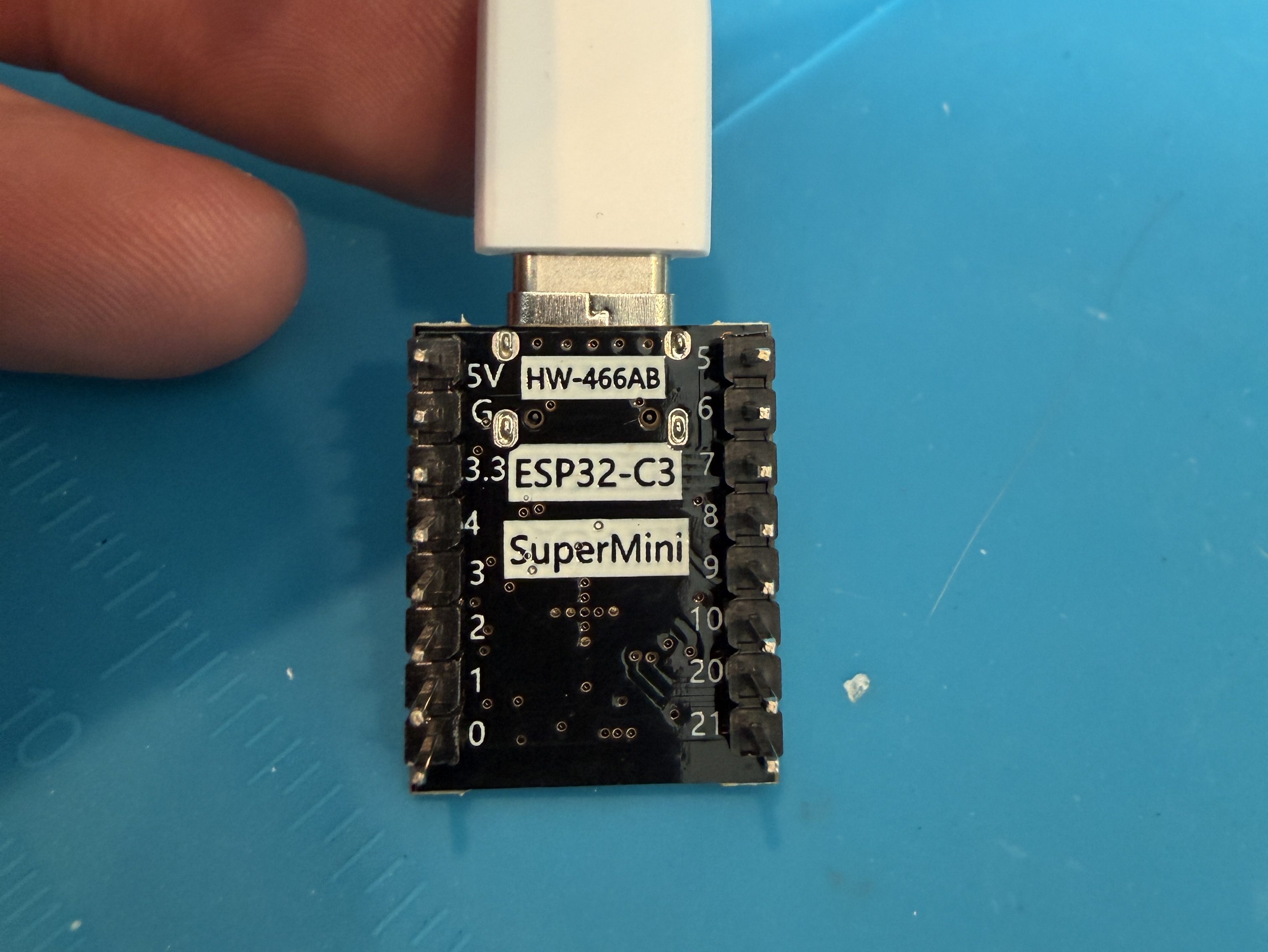
To make my ESPHome device I used:
- ESP32 C3 Super Mini Dev Board
- Waveshare SN65HVD230 CAN Board
- RJ45 Breakout
- 100μF Electrolytic Capacitor
- Solderless Breadboard
- PCB Board
- Project Box
- USB C Charger Block
- USB C Cable
All testing was done on a breadboard.
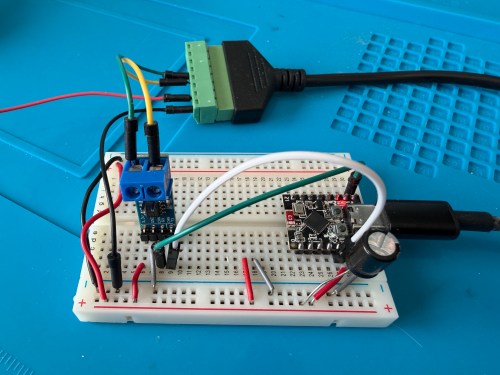
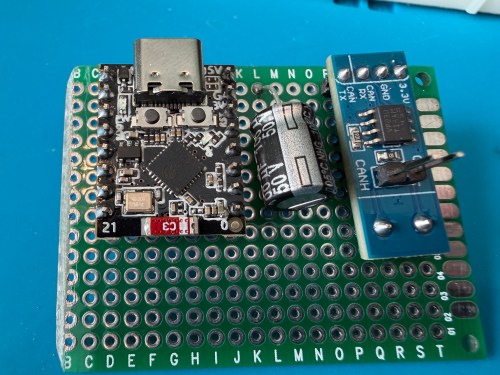
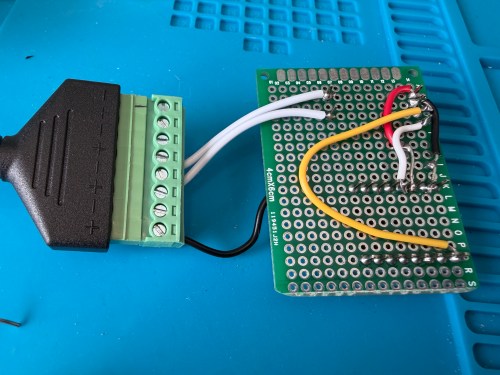
Connections:
- ESP32 G -> CAN Board G -> RJ45 Pin 8 -> Capacitor stripe side
- ESP32 3.3 -> CAN Board 3.3 -> Capacitor non-stripe side
- ESP32 Pin 4 -> CAN Board TX
- ESP32 Pin 5 -> CAN Board RX
- CAN Board CANH -> RJ45 Pin 5
- CAN Board CANL -> RJ45 Pin 4
Start with this YAML for your ESPHome device:
# Add your standard esphome, ota, api, and wifi sections here at the top
logger:
level: DEBUG
esp32:
board: esp32-c3-devkitm-1
framework:
type: esp-idf
canbus:
- platform: esp32_can
id: can
tx_pin: GPIO4
rx_pin: GPIO5
bit_rate: 125KBPS
can_id: 0x05
use_extended_id: false
on_frame:
- can_id: 0x000
can_id_mask: 0x000 # This catches EVERYTHING
then:
- lambda: |-
std::string res = "";
for (int i = 0; i < x.size(); i++) {
char buf[5];
sprintf(buf, "%02X ", x[i]);
res += buf;
}
ESP_LOGD("ALORAIR_FINDER", "Received ID: 0x%03X, Data: %s", can_id, res.c_str());
# ====== Periodic Polling to Request Status ======
interval:
- interval: 10s
then:
- canbus.send:
can_id: 0x123
use_extended_id: false
data: [0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]
This will test sending and receiving. After you flash the device and have it connected to the dehumidifier, open the ESPHome device log and look for lines like below.

If you see errors after the send or don’t receive messages back, try changing the bit_rate from 125 to 50, install, and recheck the logs.

If you do receive messages back, make note of the value after Received ID, which is 0x123 above. Then open up the ESPHome device’s YAML again and replace everything below type: esp-idf with the following.
# ──────────────────────────────────────────────
# CAN Bus Protocol
# ──────────────────────────────────────────────
# Bus: 125Kbps, CAN ID 0x123 for both directions
#
# Status frame (from unit):
# Byte 0: Humidity (%)
# Byte 1: Setpoint (%), 35 = Continuous mode
# Byte 2: Temperature (°C)
# Byte 3: Unused
# Byte 4: Status bits
# Bit 0 (0x01): Power on
# Bit 1 (0x02): Compressor running
# Bit 3 (0x08): Continuous mode / Defrost
# Bytes 5-7: Unused?
#
# Command frame (to unit):
# Byte 0: Setpoint + 128 (to change setpoint)
# Byte 2: 0x01 = toggle power
# Continuous mode: send setpoint 35 + 128 = 163 (0xA3)
#
# Echo filtering: commands have byte 0 > 128,
# status frames have byte 0 < 100
# ──────────────────────────────────────────────
script:
- id: refresh_status
mode: restart
then:
- delay: 1s
- canbus.send:
can_id: 0x123
data: [0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]
interval:
- interval: 60s
then:
- script.execute: refresh_status
time:
- platform: homeassistant
id: homeassistant_time
globals:
- id: power
type: bool
restore_value: yes
- id: continuous
type: bool
restore_value: yes
canbus:
- platform: esp32_can
id: can
tx_pin: GPIO4
rx_pin: GPIO5
bit_rate: 125KBPS
can_id: 0x05
use_extended_id: false
on_frame:
- can_id: 0x123
then:
- lambda: |-
if (x.size() < 5 || x[0] == 0) return;
// Debug logging (uncomment the lines below if you need to debug the data packets)
// char buf[64];
// snprintf(buf, sizeof(buf), "%02X %02X %02X %02X %02X %02X %02X %02X",
// x[0], x.size() > 1 ? x[1] : 0,
// x.size() > 2 ? x[2] : 0, x.size() > 3 ? x[3] : 0,
// x.size() > 4 ? x[4] : 0, x.size() > 5 ? x[5] : 0,
// x.size() > 6 ? x[6] : 0, x.size() > 7 ? x[7] : 0);
// ESP_LOGD("canbus", "0x123 [%d]: %s", x.size(), buf);
// Filter out command echoes (byte 0 > 128)
if (x[0] >= 100) return;
// Byte 0: Humidity (%)
id(humidity).publish_state(x[0]);
// Byte 1: Setpoint (%), 35 = continuous mode
id(setpoint_value).publish_state(x[1]);
// Byte 2: Temperature (°C, convert to °F)
id(temperature).publish_state(x[2] * 9.0 / 5.0 + 32.0);
// Byte 4: Status bits
bool power_on = x[4] & 0x01;
bool compressor = x[4] & 0x02;
bool cont_defrost = x[4] & 0x08;
bool is_continuous = (x[1] == 35);
// Update sensors
id(compressor_status).publish_state(compressor);
id(defrost_status).publish_state(cont_defrost && !is_continuous);
// Sync globals
id(power) = power_on || is_continuous;
id(continuous) = is_continuous;
// Build status string
std::string status_str;
if (!power_on && !is_continuous) {
status_str = "Off";
} else if (is_continuous && cont_defrost) {
status_str = "Continuous";
if (compressor) status_str += ", Compressor On";
} else if (cont_defrost) {
status_str = "Defrosting";
} else if (compressor) {
status_str = "Running";
} else if (power_on) {
status_str = "Idle";
}
id(status_text).publish_state(status_str.c_str());
// Update timestamp
auto time = id(homeassistant_time).now();
if (time.is_valid()) {
char time_str[20];
time_t now = time.timestamp;
strftime(time_str, sizeof(time_str), "%H:%M:%S", localtime(&now));
id(last_update).publish_state(time_str);
}
// Alert on unexpected bits in byte 4
uint8_t unknown_b4 = x[4] & ~0x0B; // mask out known bits 0,1,3
if (unknown_b4 != 0) {
ESP_LOGW("canbus", "Unknown bits in byte 4: 0x%02X", unknown_b4);
id(unknown_data).publish_state("Byte 4 unknown bits: 0x" +
std::string(1, "0123456789ABCDEF"[(unknown_b4 >> 4) & 0x0F]) +
std::string(1, "0123456789ABCDEF"[unknown_b4 & 0x0F]));
}
// Alert on any non-zero data in bytes 3, 5, 6, 7
if (x[3] != 0 || x[5] != 0 || x[6] != 0 || x[7] != 0) {
ESP_LOGW("canbus", "Unexpected data in unused bytes: B3=0x%02X B5=0x%02X B6=0x%02X B7=0x%02X", x[3], x[5], x[6], x[7]);
char msg[64];
snprintf(msg, sizeof(msg), "B3:%02X B5:%02X B6:%02X B7:%02X", x[3], x[5], x[6], x[7]);
id(unknown_data).publish_state(msg);
}
text_sensor:
- platform: template
name: "Status"
id: status_text
- platform: template
name: "Last CAN Update"
id: last_update
- platform: template
name: "Unknown CAN Data"
id: unknown_data
entity_category: diagnostic
sensor:
- platform: template
name: "Humidity"
id: humidity
unit_of_measurement: "%"
device_class: humidity
state_class: measurement
accuracy_decimals: 0
filters:
- median:
window_size: 5
send_every: 1
- delta: 1
- platform: template
name: "Temperature"
id: temperature
unit_of_measurement: "°F"
device_class: temperature
state_class: measurement
accuracy_decimals: 0
filters:
- median:
window_size: 5
send_every: 1
- delta: 1
- platform: template
name: "Setpoint"
id: setpoint_value
unit_of_measurement: "%"
accuracy_decimals: 0
binary_sensor:
- platform: template
name: "Compressor"
id: compressor_status
device_class: power
- platform: template
name: "Defrost"
id: defrost_status
device_class: cold
number:
- platform: template
name: "Change Setpoint"
id: setpoint_control
min_value: 36
max_value: 90
step: 1
optimistic: true
set_action:
then:
- lambda: |-
uint8_t sp = (uint8_t)(x + 128);
std::vector<uint8_t> data = { sp, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
id(can).send_data(0x123, false, data);
- script.execute: refresh_status
switch:
- platform: template
name: "Power"
id: enable_dehumid
lambda: return id(power);
turn_on_action:
- lambda: |-
if (!id(power)) {
std::vector<uint8_t> data = {0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00};
id(can).send_data(0x123, false, data);
}
- script.execute: refresh_status
turn_off_action:
- lambda: |-
if (id(power)) {
// If in continuous mode, exit continuous first by setting a normal setpoint
if (id(continuous)) {
float sp_val = id(setpoint_control).state;
if (std::isnan(sp_val) || sp_val < 36) sp_val = 55;
uint8_t sp = (uint8_t)(sp_val + 128);
std::vector<uint8_t> data = { sp, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
id(can).send_data(0x123, false, data);
delay(500);
}
std::vector<uint8_t> data = {0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00};
id(can).send_data(0x123, false, data);
}
- script.execute: refresh_status
- platform: template
name: "Continuous Mode"
id: continuous_mode_enable
lambda: return id(continuous);
turn_on_action:
- lambda: |-
// Send setpoint 35 (below minimum) to enter continuous mode
uint8_t sp = (uint8_t)(35 + 128);
std::vector<uint8_t> data = { sp, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
id(can).send_data(0x123, false, data);
- script.execute: refresh_status
turn_off_action:
- lambda: |-
// Exit continuous by sending a normal setpoint
float sp_val = id(setpoint_control).state;
if (std::isnan(sp_val) || sp_val < 36) {
sp_val = id(setpoint_value).state;
}
if (std::isnan(sp_val) || sp_val < 36) {
sp_val = 55;
}
uint8_t sp = (uint8_t)(sp_val + 128);
std::vector<uint8_t> data = { sp, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
id(can).send_data(0x123, false, data);
- script.execute: refresh_status
automation:
- alias: "Alorair Unknown CAN Data Alert"
trigger:
- platform: state
entity_id: sensor.alorair_dehumidifier_unknown_can_data
not_to:
- ""
- "unknown"
- "unavailable"
action:
- service: notify.mobile_app_YOUR_PHONE
data:
title: "Alorair: Unknown CAN Data"
message: "{{ trigger.to_state.state }}"
data:
tag: alorair_unknown_can
importance: low
If your ID was different than 0x123 (0x3b0 seems common), change the can_id under on_frame. Update mobile_app_YOUR_PHONE for your phone. Install this new code to the device. Go to Settings -> Devices & services -> ESPHome. If your device isn’t already listed, add it, and click through to see the entities. Hopefully you see the Controls and Sensors with data.
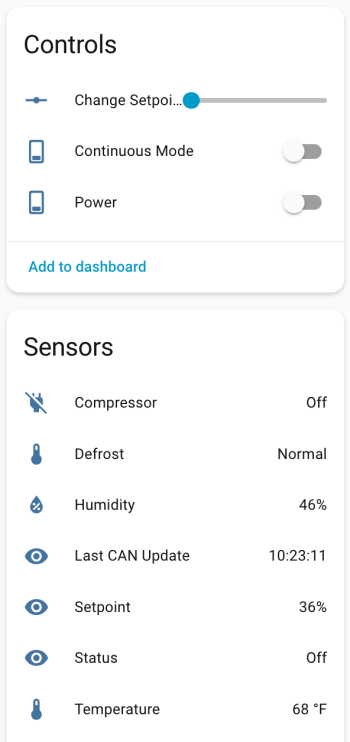
Try to toggle the power and change the setpoint. If it’s working, the dehumidifier should respond. Good luck! If all is working, I suggest adjusting your logging level to WARN. There is some stuff in the YAML to alert if the unit sends data that isn’t recognized, because there might be flags or statuses not implemented.
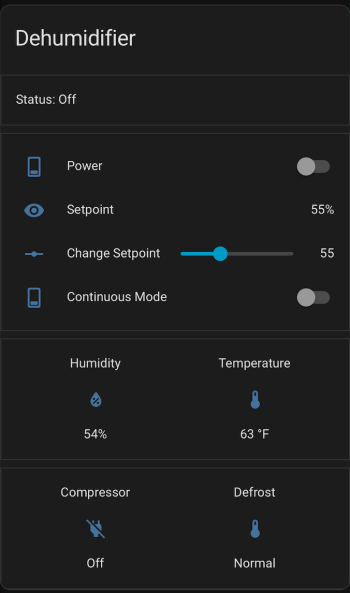
If you install the stack-in-card via HACS, here’s some YAML for your dashboard. Make sure to update the entity names to match what you have.
type: custom:stack-in-card
title: Dehumidifier
cards:
- type: markdown
content: >
Status: {{ states('sensor.alorair_dehumidifier_status') }}
- type: entities
entities:
- entity: switch.alorair_dehumidifier_power
name: Power
- entity: sensor.alorair_dehumidifier_setpoint
name: Setpoint
- entity: number.alorair_dehumidifier_change_setpoint
name: Change Setpoint
- entity: switch.alorair_dehumidifier_continuous_mode
name: Continuous Mode
- type: glance
entities:
- entity: sensor.alorair_dehumidifier_humidity
name: Humidity
- entity: sensor.alorair_dehumidifier_temperature
name: Temperature
columns: 2
- type: glance
entities:
- entity: binary_sensor.alorair_dehumidifier_compressor
name: Compressor
- entity: binary_sensor.alorair_dehumidifier_defrost
name: Defrost
columns: 2
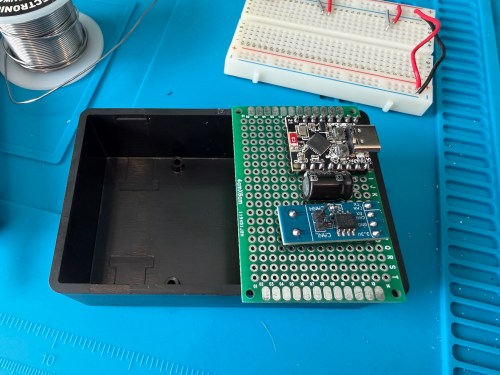
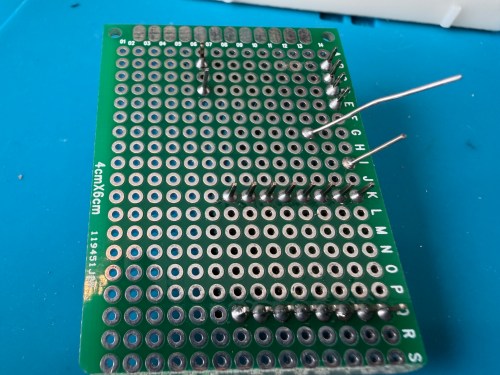
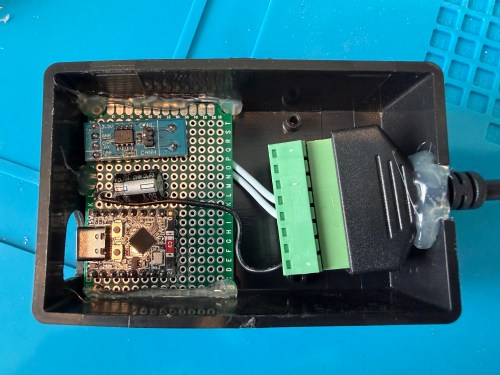
Once I got everything working, I soldered to a permanent board and hot glued it inside a project box.


I haven’t worked on automations yet, but I have time before spring arrives when I need to run the dehumidifier.
